What's up, I'm Hrish Leen

Robot Learning
I’m a PhD student at the Georgia Institute of Technology, where I work with Prof. Animesh Garg at the People, AI & Robots Lab on robot learning. My research focuses on imbuing robots with physical intelligence, driven by a broader curiosity to understand the inner workings of the human brain.
Previously, I completed my undergraduate and master’s degrees at UC Berkeley, where I worked with Prof. Sergey Levine in the Robotic AI and Learning Lab.
Featured Research
FLASH: Flow-Based Language-Annotated Grasp Synthesis for Dexterous Hands
, Jeremy A. Collins, Kunal Aneja, Nhi Nguyen, Priyadarshini Tamilselvan, Sri Siddarth Chakaravarthy P, Animesh Garg
CoRL 2025 Workshop Dexterous Manipulation Spotlight
FLASH, a method for language-conditioned dexterous grasping that jointly models task intent and physical contact quality for robot hands.
Towards Policy-Aware World Models
Varun Giridhar, Ignat Georgiev, , Nicklas Hansen, Animesh Garg
Preprint
Policy-gradient ESNR predicts downstream policy performance, giving a practical diagnostic for “policy-aware” world models and guiding pretraining, architecture tweaks, and policy choice.
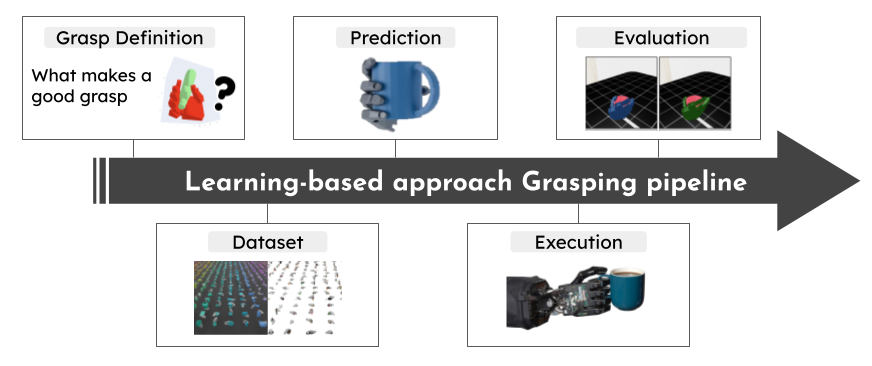
Dexterous Learning for Dexterous Robot Grasping - A Survey
, Kunal Aneja, Chetan Reddy, Priyadarshini Tamilselvan, Nhi Nguyen, Sri Siddarth Chakaravarthy, Jeremy Collins, Miroslav Bogdanovic, Animesh Garg
Journal Preprint
A comprehensive survey of deep learning approaches for dexterous robotic grasping, emphasizing recent progress enabled by multi-modal models and data-driven techniques.