Research Projects
Towards Policy-Aware World Models
Varun Giridhar, Ignat Georgiev, , Nicklas Hansen, Animesh Garg
Preprint
Policy-gradient ESNR predicts downstream policy performance, giving a practical diagnostic for “policy-aware” world models and guiding pretraining, architecture tweaks, and policy choice.
FLASH: Flow-Based Language-Annotated Grasp Synthesis for Dexterous Hands
, Jeremy A. Collins, Kunal Aneja, Nhi Nguyen, Priyadarshini Tamilselvan, Sri Siddarth Chakaravarthy P, Animesh Garg
CoRL 2025 Workshop Dexterous Manipulation Spotlight
FLASH, a method for language-conditioned dexterous grasping that jointly models task intent and physical contact quality for robot hands.
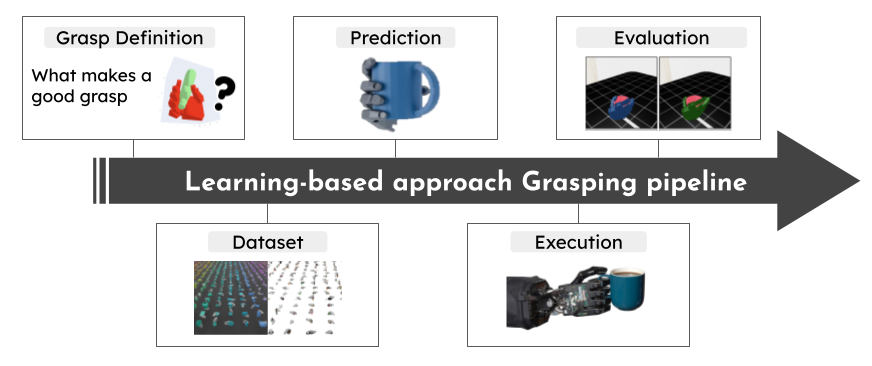
Dexterous Learning for Dexterous Robot Grasping - A Survey
, Kunal Aneja, Chetan Reddy, Priyadarshini Tamilselvan, Nhi Nguyen, Sri Siddarth Chakaravarthy, Jeremy Collins, Miroslav Bogdanovic, Animesh Garg
Journal Preprint
A comprehensive survey of deep learning approaches for dexterous robotic grasping, emphasizing recent progress enabled by multi-modal models and data-driven techniques.
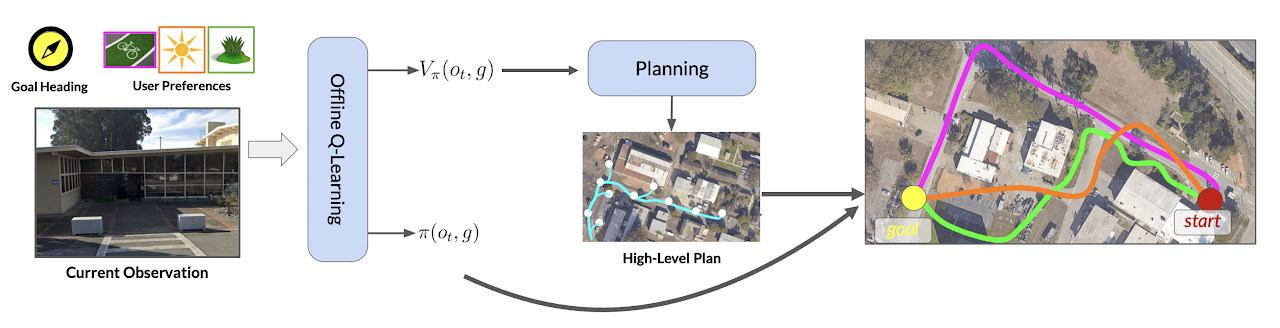
Offline Reinforcement Learning for Customizable Visual Navigation
Dhruv Shah, Arjun Bhorkar, , Ilya Kostrikov, Nicholas Rhinehart, Sergey Levine
Oral at Conference on Robot Learning (CoRL) 2022
NeurIPS 2022 Workshop Offline RL
NeurIPS 2022 Workshop DeepRL
Offline RL doesn't scale well for long-horizon navigation but using values predicted with ORL within a topological graph framework can enable cool behavior on real robots!